Oferta Dla Klientów
Główne Obszary Współpracy
Projekty B+R
Projekty Badawczo-Rozwojowe (B+R) na Zlecenie Realizujemy dedykowane projekty B+R – od analizy problemu, przez opracowanie koncepcji, aż po budowę i wdrożenie prototypu. Nasze zespoły specjalizują się w:
- Projektowaniu i konstrukcji robotów mobilnych do specyficznych zastosowań (transport, inspekcja, monitoring).
- Rozwoju zaawansowanych systemów autonomicznej nawigacji, percepcji otoczenia i podejmowania decyzji.
- Tworzeniu oprogramowania sterującego dla flot robotów.
- Integracji systemów robotycznych z istniejącą infrastrukturą przemysłową (np. systemy klasy ERP/MES).
Ekspertyzy i doradztwo
Ekspertyzy i Doradztwo Technologiczne Oferujemy profesjonalne wsparcie merytoryczne, w tym:
- Analizy wykonalności dla projektów wdrożenia robotów mobilnych.
- Audyty technologiczne i pomoc w doborze optymalnych rozwiązań z zakresu automatyzacji i robotyzacji.
- Optymalizację procesów produkcyjnych z wykorzystaniem robotyki.
- Opracowywanie raportów i analiz dotyczących najnowszych trendów technologicznych.
Prototypowanie
Prototypowanie i Rozwiązania Szyte na Miarę Budujemy i testujemy funkcjonalne prototypy robotów mobilnych dostosowane do indywidualnych potrzeb klienta. Przykładem możliwości jest projekt inteligentnego robota transportującego INTRO, stworzony w odpowiedzi na konkretne wyzwania przemysłu.
Szkolenia
Szkolenia Specjalistyczne dla Kadr Inżynierskich Organizujemy dedykowane, zamknięte szkolenia i warsztaty dla pracowników firm, obejmujące tematykę programowania, obsługi i wdrażania systemów robotycznych.
Demo

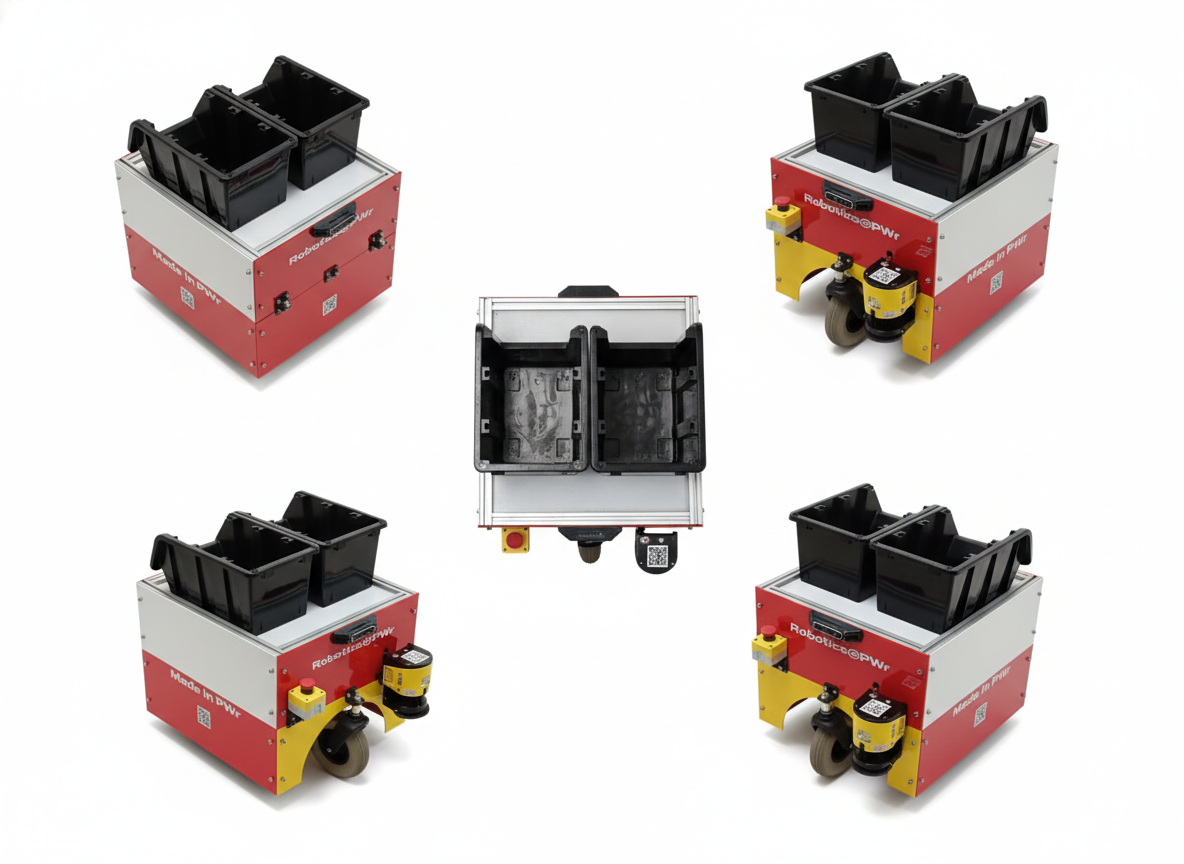
Prezentowany robot to autonomiczna platforma mobilna (AMR) zaprojektowana i zbudowana w ramach działań Robotics@PWr na Politechnice Wrocławskiej. Stanowi demonstrator technologii, służący do rozwoju i testowania rozwiązań z zakresu autonomicznej nawigacji oraz transportu wewnętrznego.
Główne elementy konstrukcyjne i funkcjonalne:
Platforma bazowa: Trójkołowa konstrukcja z napędem różnicowym i pojedynczym kołem samonastawnym z przodu, umożliwiająca manewrowanie w ograniczonych przestrzeniach. Rama wykonana z profili aluminiowych, obudowa z paneli kompozytowych w barwach czerwono-żółtych.
Transport ładunku: Górna platforma wyposażona w dwa dedykowane, pojemniki, co wskazuje na przeznaczenie do przewozu niewielkich ładunków lub komponentów.
Skaner laserowy (LiDAR) SICK: Zamontowany w przedniej części robota element systemu bezpieczeństwa odpowiada za detekcję przeszkód oraz skanowanie otoczenia na potrzeby algorytmów SLAM (Simultaneous Localization and Mapping), stanowiąc kluczowy komponent systemu autonomicznej nawigacji.
Kamera głębi (Intel RealSense): Umieszczona centralnie z przodu, dostarcza danych wizyjnych i informacji o głębi, wspomagając percepcję otoczenia i lokalizację.
Przycisk Stop Awaryjny: Czerwony przycisk awaryjny umieszczony na przedniej ściance, zapewniający możliwość natychmiastowego zatrzymania robota w nagłych sytuacjach.
Przeznaczenie: Platforma ma za zadanie demonstrować możliwości robotów mobilnych w środowisku przemysłowym, służąc jednocześnie jako elastyczne narzędzie do dalszych badań i rozwoju algorytmów robotyki autonomicznej.